В окружении стаи буксиров-роботов
28.09.2023
Морской транспорт
К вопросам реализации автономного судовождения в портовой акватории
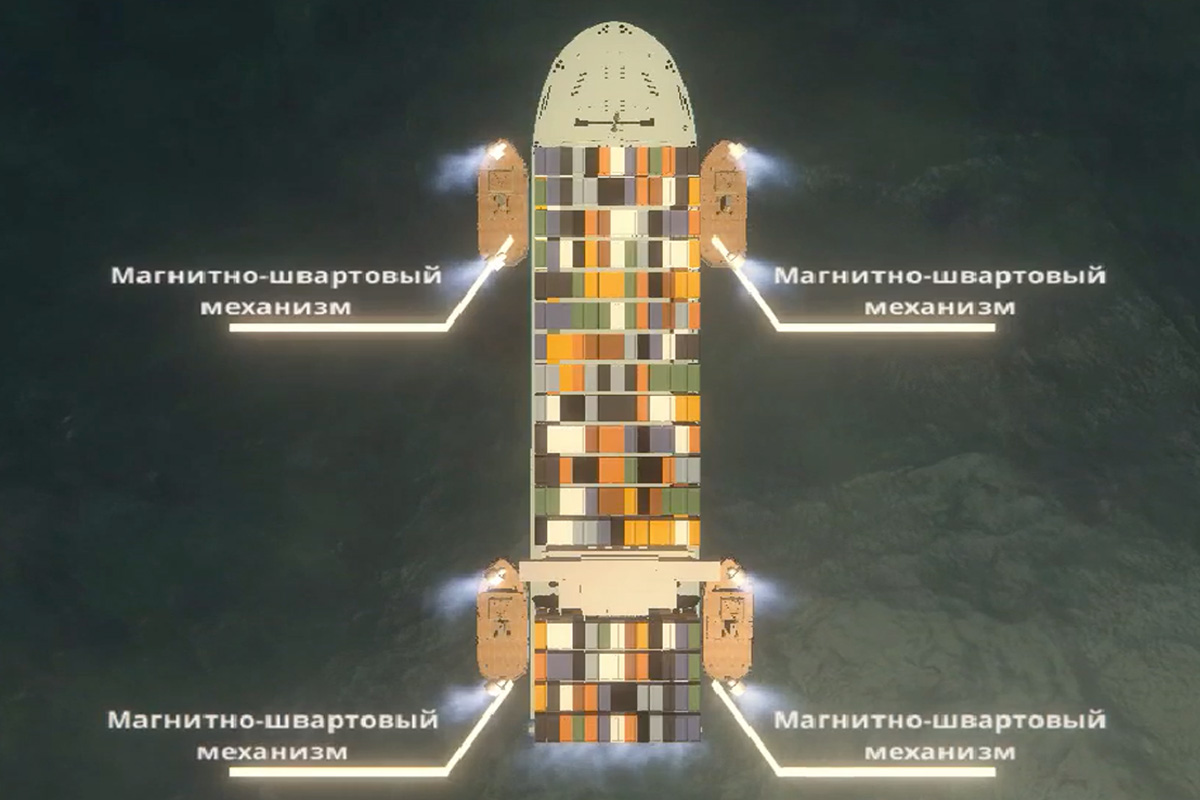
Фото: Пример жесткой сцепки четырех буксиров-автоматов и грузового судна
В статье авторы обсуждают реализацию автономного судовождения в портовой акватории с использованием стаи азимутальных буксиров-автоматов (АБА). Отличительной особенностью таких буксиров является использование жесткой сцепки между грузовым судном и буксиром для выполнения задач проводки и швартовки непосредственно к причалу.
Виктор Сенченко, профессор кафедры Судовождение, научный руководитель научно-исследовательской лаборатории «Автоматизация судовождения» ГМУ им. адм. Ф.Ф. Ушакова
Виктор Дергилев, судоводитель. аспирант кафедры «Судовождение» ГМУ им. адм. Ф.Ф. Ушакова
В настоящее время среди широкой морской общественности существует мнение, что автономное судовождение полностью и четко прописано на 99-й сессии Комитетом по безопасности на море (MSC) Международной морской организации (IMO), установившей четыре степени автономности морских судов:
– морское судно (AUT1) с автоматизированными процессами и системой поддержки принятия решения (СППР) в присутствии моряков на борту судна для управления и контроля;
– морское судно (AUT2) с экипажем на борту, управляемое дистанционно посредством удаленного контроля;
– морское судно (AUT3), управляемое дистанционно (удаленно) при отсутствии экипажа;
– морское судно (AUT4) полностью автономное с бортовой системой, способной самостоятельно принимать решения и выполнять действия без экипажа.
Принято считать, что этим и исчерпывается понятие «автономное судовождение», хотя это далеко не так.
Движение судна в акватории порта
На наш взгляд, судовождение можно условно разбить на две части – движение судна в портовой акватории и в море (на переходе). Наиболее понятно движение судна на переходе. Однако вторая часть – движение в портовой акватории – имеет ряд особенностей, существенно отличающихся от движения на переходе.
Поскольку проводка и швартовка грузового судна в портовой акватории проводятся в стесненных условиях, а зачастую в очень сложных для маневрирования, то безопасность выполнения этих морских операций в решающей степени зависит от маневренных характеристик самого судна.
При этом саму безопасность мореплавания обеспечивает квалифицированный экипаж совместно с лоцманом. Внедрение же автономного судовождения подразумевает самостоятельный подход судна к причалу, то есть все технические решения выполнения морских операций на этом этапе должны осуществляться уже без участия человека.
Также внедрение автономного судовождения на всех участках движения грузового судна следует рассматривать и с экономической точки зрения. Около 80% от всего товарооборота приходится на перевозку морским транспортом, из чего следует, что внедрение полномасштабного автономного судовождения именно на крупнотоннажном флоте (балкеры, танкеры и контейнеровозы) приведет к наибольшему экономическому эффекту.
Так как крупнотоннажные суда такого типа имеют размеры до 250 метров в длину и до 50 метров в ширину, а дедвейт варьируется от 50-60 тыс. до 120-150 тыс. тонн, то прежде всего особенности автономного судовождения и экономический эффект необходимо рассматривать именно в портовой акватории.
В настоящее время на участке морского перехода автономное судовождение уже реализуется многими судоходными компаниями. При плавании в открытом море для реализации автономного судовождения достаточно решения стандартного набора задач. В такие задачи входит позиционирование, удержание судна на заданном курсе, выход судна на новый курс, движение по траектории и некоторые другие. Отдельно стоит отметить задачу, связанную с расхождением судов, поскольку ее решение носит нетривиальный характер.
Движение крупнотоннажного судна в портовой акватории характеризуется малой маневренностью, поскольку классические пропульсивные и рулевые комплексы у такого класса судов состоят, как правило, из одного винта и одного руля, что не дает соответствующей маневренности при выполнении задач проводки и швартовки непосредственно к причалу.
Напомним, что проводка крупнотоннажного судна осуществляется на скорости 3-5 узлов, а непосредственно швартовка к разному типу причалов происходит и при меньших скоростях, доходящих до 0. Классический метод, используемый при выполнении таких морских операций (раскантовка, движение лагом и т.д.), подразумевает использование двух, трех или четырех буксиров-кантовщиков. Особенностью работы данного типа современных буксиров является применение так называемой гибкой сцепки между буксиром и грузовым судном посредством швартовных канатов. Такой способ обеспечения требуемой маневренности крупнотоннажного судна в портовой акватории обладает двумя особенностями:
– требованием значительного пространства для осуществления маневров, что на сегодняшний день является проблемой и именуется «узким бассейном». Современным решением данного вопроса является использование диспетчеризации подхода судов для погрузки/разгрузки у причала (см. рис. 1);
– требованием присутствия человека на борту грузового судна и буксира для подачи и крепления швартовных концов в процессе сцепки буксира с грузовым судном. То есть при гибкой сцепке не приходится говорить об автономном судовождении при проводке и швартовке грузового судна.
Рис. 1. Диспетчеризация порта Новороссийск

Решением данных вопросов может быть использование жесткой сцепки между буксиром-автоматом и грузовым судном, осуществление которого реализуется механическим, пневматическим и магнитным способами. Предварительная проработка этих вариантов в настоящее время оставляет преимущество за магнитным способом. Данный способ может быть применен также и при фиксации судна у причала на время погрузки/выгрузки и стоянки грузового судна у причала.
Буксиры нового типа
Выполнение проводки и швартовки крупнотоннажного судна в портовой акватории в автономном режиме требует разработки нового типа буксиров, ориентированных на выполнение буксирных операций в режиме группы. Такие буксиры предназначены выполнять роль так называемых внешних распределенных подруливающих устройств в режиме автономного управления или дистанционного пилотирования из специального оборудованного рабочего места «берегового» капитана (см. рис. 2 и 3).
Рис. 2. Роботизированный азимутальный буксир-автомат (АБА)

Рис. 3. Центр дистанционного управления судов (ЦДУС)

Анализ возможных вариантов построения общей жесткой механической фигуры «грузовое судно + группа буксиров-автоматов» строится на том, что в 90% случаев это будут операции на укол как носом, так и лагом и лишь не многим более 10% рабочего времени в режиме оттяжки (рис. 4). Таким образом, только в режиме оттяжки будет использоваться магнитное поле буксирного поворотного устройства при выполнении операции отхода от причала.
Предварительные математические расчеты показывают, что для крупнотоннажных грузовых судов дедвейтом 60–150 тыс. тонн наиболее эффективно использовать группу из четырех буксиров-автоматов в режиме «стая». При этом каждый буксир должен иметь две винторулевые колонки, расположенные в диаметральной плоскости буксира мощностью 1200 кВт каждая, два поворотных буксирных швартовных механизма, обеспечивающих суммарную силу захвата 70 тонн.
На наш взгляд, наиболее приемлемыми технологическими и техническими решениями является использование стаи буксиров-автоматов, основанных на электродвижении и обладающих примерными характеристиками:
– район плавания: А1, А2;
– способность противостоять воздействию волнения до 1,5 метров и ветра до 15 м/с;
– время автономной работы от аккумуляторов – порядка 6 часов;
– основные параметры буксира: длина до 20 метров, ширина до 10 метров и осадка до 3 метров.
Для эффективной реализации безэкипажного судовождения в портовой акватории на базе стаи буксиров-автоматов потребуется наличие трех сегментов портовой инфраструктуры:
• береговой сегмент. Система мониторинга швартовных операций (СМШО), позволяющая определить продольное и поперечное смещение корпуса судна относительно причальной линии посредством высокоточного мониторинга швартовных операций;
• морской сегмент. Система автоматического гидрометеомониторинга морской акватории (АСГММ) для определения обстановки с использованием полей ветра, течения и волны в реальном времени за счет сети автономных гидрометеорологических буйковых станций;
• бортовой сегмент. Система высокоточной проводки и швартовки (СВПШ) / носимый лоцманский комплект (НЛК), основанный на базе технологии двух опорных точек (Т2ОТ) с использованием навигационного оборудования, принимающего поправки реальной кинематики (RTK), предназначенного для высокоточного позиционирования корпуса судна. Высокоточное отображение текущей навигационной обстановки на подходах и в непосредственной близости от грузового терминала также дополнительно обеспечивается в СВПШ/НЛК.
Такой подход позволит реализовать автономное судовождение крупнотоннажных грузовых судов при движении в портовой акватории, являясь основой для развития концепции «умного» порта и подразумевая еще более глубокую синхронизацию движения грузов по всему задействованному мультимодальному транспортному коридору.
Необходимо отметить, что реализация автономного судовождения крупнотоннажных судов при переходе от границ одного порта до границ другого действительно даст небольшой экономический эффект. Однако полный эффект от внедрения автономного судовождения возможен только при выполнении автономного движения грузовых судов на всех этапах от причала к причалу. В настоящее время в РФ выполняется государственный проект автономного судовождения по заказу Минпромторга РФ, в рамках которого и проверяются эти технологические и технические решения безэкипажного судовождения крупнотоннажных грузовых судов в портовой акватории.
Заключение
Таким образом, полномасштабное внедрение концепции автономного судовождения грузовых судов зависит от технологических и технических решений, основанных на использовании портовых роботизированных азимутальных буксиров-автоматов, реализующих режим жесткой сцепки с грузовым судном в количестве 2–4 ед. в группе. Другими словами, речь идет о необходимости создания современного автономного портового флота.
Для уменьшения неопределенностей при самостоятельном заходе автономного судна в порт обязательно наличие морского, берегового и бортового оборудования автономного судовождения, работающих комплексно.
Подчеркнем, что наибольший экономический эффект от внедрения новых технологий может быть достигнут именно в концепции «умного» порта, развитие которого уже сейчас позволит обрабатывать в автономном режиме как существующие грузовые суда, управляемые экипажем на борту, так и перспективные безэкипажные морские автономные надводные суда (МАНС), управляемые автономно и через центр дистанционного управления судов (ЦДУС).
С точки зрения инвестирования и приоритетности развития автономного судовождения следует вывод, что инвестирование в концепцию «умного» порта является более выгодным по отношению к инвестированию в концепцию «умного» судна.
Морской фло №3 (2023)