


Потеря мореходности судна равна катастрофе
16.01.2025
Безопасность мореплавания
Результаты испытаний автоматических средств контроля состояния судна типа АСКОП

Фото: Судно «Григорий Ловцов»/пресс-служба Дальневосточной транспортной прокуратуры
Статистика аварийности флота указывает на не снижающийся уровень катастроф по статье «Потеря мореходности судов в море». Этот тяжелый вид аварий ведет к гибели судов и людей. В море от потери остойчивости судно переворачивается быстро, на волнении от потери прочности корпус судна ломается почти мгновенно. Спасти экипаж и судно за очень короткое время практически невозможно.
Евгений Найденов, капитан дальнего плавания, профессор
Случившаяся на Сахалине в октябре авария теплохода «Григорий Ловцов» показала, что опрокидывания происходят не только в море. Часто суда теряют остойчивость и прочность и в порту во время грузовых операций. Как это происходит? От потери остойчивости суда неожиданно сильно накреняются, смещается незакрепленный груз, повреждаются береговые краны, сооружения, собственные конструкции, вызывая большие материальные потери. От нарушения прочности в корпусе судна появляются трещины. Основной причиной указанных аварий является невозможность определения в эксплуатационных условиях основных мореходно-прочностных характеристик судна с достаточной точностью и надежностью.
Предотвращение аварий
Задача предотвращения аварий от потери остойчивости и прочности транспортных судов в настоящее время решается путем улучшения их конструктивных параметров и нормирования мореходно-прочностных характеристик для условий эксплуатации.
Улучшение конструкций судов и введение допустимых норм остойчивости и прочности не является достаточным условием безопасной эксплуатации флота. Ненадежный контроль в эксплуатационных условиях для большинства транспортных, промысловых и других видов судов фактических характеристик остойчивости и прочности ведет к тому, что их значения выходят за допустимые нормы. Вследствие чего возникает аварийная ситуация. Поэтому РС требует с целью контроля определять количественные значения характеристик остойчивости и прочности судна в течение всего периода его эксплуатации.
Существующий на грузовых судах транспортного флота расчетный способ определения значений характеристик остойчивости и прочности, заложенный в основном документе «Информация об остойчивости и прочности грузового судна» и реализованный в программах бортовых компьютеров, не обладает достаточной надежностью как в обеспечении безопасности мореплавания, так и в повышении эффективности работы флота.
Расчетный метод требует знания как минимум двух судовых координат и массы каждой нагрузки (всех грузов, балласта и судовых запасов), установить которые с достаточной точностью для большинства грузов невозможно. Для многих категорий грузов (лесные, генеральные тяжеловесные, контейнеры и др.) погрешности определения масс и судовых координат расположения их центров тяжести после погрузки значительно превышают требуемые.
Кроме того, результаты исследований показывают, что использование расчетной формулы ведет к значительным погрешностям (ошибки метода). Расчетный способ требует ручного ввода оператором множества данных о нагрузках, что увеличивает вероятность дополнительных ошибок и не исключает промахи. Его применение оправдано лишь при составлении и контроле предварительного грузового плана.
В результате увеличивающегося дефицита времени при грузовых операциях, повышающейся скорости погрузки-выгрузки ролкеров, контейнеровозов, лихтеровозов, сокращения экипажей, громоздкости и неточности расчетного способа, повышения уровня автоматизации грузовых операций в портах еще в восьмидесятых годах прошлого века назрел вопрос о необходимости создания средств измерения состояния судна, на первом этапе, в частности, систем автоматического («прямого», «инструментального») измерения фактических (после погрузки на судно и во время рейса) мореходно-прочностных характеристик с помощью датчиков и вычислительной техники.
Кренование
Обзор методов определения одного из основных параметров остойчивости – метацентрической высоты –показал, что наиболее приемлем для создания таких средств метод кренования судна, который применяется Регистром (так называемый опыт кренования) для определения с высокой точностью центра тяжести вновь построенного порожнего судна. По этому методу судно на тихой воде накреняется искусственным моментом на небольшой угол и по известной формуле определяется метацентрическая высота:
h = Ркр lкр / D tg ∆Ө, (1)
где h – поперечная метацентрическая высота, метры;
Ркр lкp – искусственный кренящий момент, тм;
Ркр – масса кренящей нагрузки, тонны;
lкр – длина плеча кренящего момента, метры;
D – водоизмещение судна во время его кренования, тонны;
∆Ө – величина (приращение) угла накренения судна,
градусы;
∆Ө = Ө1 – Ө2, (2)
где Ө1 и Ө2 –статические углы крена до начала и после окончания искусственного накренения судна соответственно. Величина ∆Ө обычно равна 1-3 градуса.
Для реализации опыта кренования средствами автоматизации принципиально необходимы: блок измерения кренящего момента, блок измерения водоизмещения, блок измерения приращения угла крена и бортовой компьютер с аппаратурой сопряжения.
Впервые на этом принципе система АСКО (автоматическая система контроля остойчивости судна) была разработана и изготовлена в ЦНИИ им. А.Н. Крылова (Санкт-Петербург). Основное назначение системы –измерение метацентрической высоты на стоянке и на ходу судна в эксплуатационных условиях.
Блок измерения кренящего момента в АСКО фиксирован по величине и состоит из встроенной стационарной креновой 18,5 куб. м цистерны, создающей постоянный кренящий момент при ее полном заполнении. Длина плеча кренящего момента фиксирована. Цистерна прессуется и осушается полностью автоматически или вручную.
Блок измерения водоизмещения состоит из двух вертикальных мерительных труб в носу в корме судна. В нижней части трубы соединены с забортной водой. Для измерения уровня в мерительных трубах используются поплавковые уровнемеры, аналоговые сигналы от которых поступают в вычислительный блок, где преобразуются в значение водоизмещения и дифферента судна.
Блок измерения приращения угла крена представляет собой датчик угла крена, установленный в диаметральной плоскости на поперечной переборке судна и предназначенный для измерения статического угла крена при качке и на ходу судна. Чувствительным элементом датчика является физический маятник, вырабатывающий аналоговый сигнал для передачи его в вычислительный блок.
Вычислительный блок состоит из преобразователей код-аналог, сумматоров, вычислительного устройства, устройства управления, сконструированных в одном корпусе, и установлен в посту управления грузовыми операциями.
Принцип работы: для определения метацентрической высоты сигналы о приращении угла крена, водоизмещения и кренящего момента поступают в вычислительное устройство, которое работает по алгоритму, базирующемуся на формуле (1).
Кренование производится в два цикла. На ходу судна начинается первый цикл определения. Перед началом создания кренящего момента в течение некоторого промежутка времени от 0 до t1 измеряют величины нескольких амплитуд колебаний судна, затем полученные мгновенные значения осредняют. В результате получают статический угол крена Ө1, который судно имело до начала кренования. В течение периода от t1 до t2 выполняют кренование судна (заполняют креповую цистерну). После кренования во второй цикл за период от t2 до t3 вторично измеряют амплитуды колебаний судна с последующим осреднением и получением статического угла крена Ө2 в момент t3. Система измеряет среднее арифметическое значение амплитуд качки, т.е. истинное значение статического угла крена заменяется оценкой его математического ожидания.
Ошибки в АСКО
АСКО была установлена на т/х «Николай Голованов» и два года проводилось ее опытная эксплуатация, подтвердившая возможность создания таких систем. Однако АСКО Минморфлотом была признана непригодной для серийного внедрения, почему:
1. Система не могла определить осадку судна, а следовательно, и водоизмещение на ходу. Уровень забортной воды в мерительных трубах сразу после отхода судна от причала менялся в значительных пределах и в противоположных направлениях относительно друг друга и относительно начального уровня, измеренного у причала. В дальнейшем уровень в мерительных трубах изменялся непредсказуемо, и измеренная осадка сильно отличалась от действительной. Не было предусмотрено демфирование колебаний уровня в трубе от продольной качки, что создавало дополнительную погрешность в измерениях. Теоретически уровень воды в трубах является функцией многих переменных: скорости и осадки судна, глубины под килем, качки (особенно продольной) и др., что не учли разработчики АСКО при ее проектировании.
2. Установленный постоянный кренящий момент не охватывал весь диапазон водоизмещений судна и значений его эксплуатационных метацентрических высот. При малой остойчивости и малых водоизмещениях величина приращения статического угла крена достигает значительных неприемлемых значений. При большой остойчивости и полном водоизмещении приращение угла крена составляет лишь десятые доли градуса, что сравнимо с допустимой его погрешностью измерения для проведения опыта кренования.
3. Не учитывалось влияние величины начального угла крена, действие ветра и присоединенных масс воды при разных статических углах крена Ө1 и Ө2.
4. При выборе датчиков, особенно кренометра, предварительно не определялась необходимая точность измеряемых ими величин. Например, при измерении приращения угла крена. При малых накренениях (1-3°) его предельная погрешность не должна превышать 0,01-0,2 градуса, что важно особенно при малой остойчивости. Определить погрешность работы АСКО после ее установки в условиях рейсов статистическими методами не представляется возможным. Фактически система измеряла характеристики остойчивости, погрешности значений которых были неизвестны.
Измерение фактических характеристик
Учитывая опыт создания приборов, измеряющих метацентрическую высоту и результаты испытаний АСКО, Минморфлот СССР заказал ЦНИИМФу разработку системы АСКОП (автоматическая система контроля остойчивости и прочности судна).
Основное назначение АСКОП – измерение фактических мореходно-прочностных характеристик транспортных судов в эксплуатационных условиях.
Совместно с ЛВИМУ и ОВИМУ ЦНИИ морского флота проанализировал возможность создания такой системы, исследовал определяющие формулы на точность в конечных результатах, разработал ТЭТ для промышленности и требования к проведению опыта кренования в эксплуатационных условиях, подобрал соответствующей точности датчики и вычислительную аппаратуру для экспериментального образца.
ЦНИИМФом совместно с Балтийским морским пароходством, Канонерским заводом и ПО «Ленинградский металлический завод» на т/х «Варнемюнде» на базе отечественной аппаратуры общепромышленного исполнения был установлен экспериментальный образец АСКОП. Параллельно на т/х «Надежда Обухова» был установлен АСКОП, разработанный на базе импортной техники. Функционально АСКОП делится на две подсистемы.
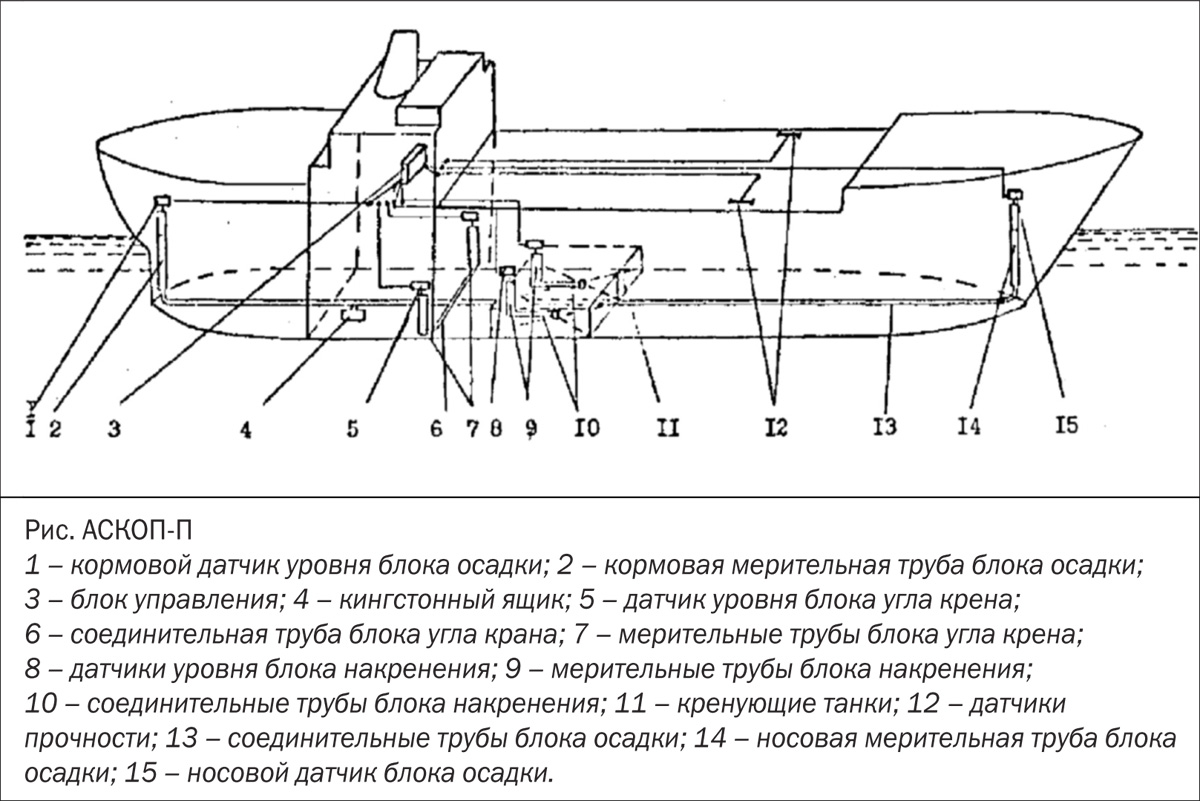
Подсистема АСКОП-П предназначена для измерения мореходно-прочностных характеристик судна в порту на тихой воде. Подсистема АСКОП-ПМ используется на ходу и служит для корректировки полученных в порту характеристик.
В подсистему АСКОП-П входят блоки измерения: осадки, статического угла крена, кренящего момента, прочности, блок управления и сигнализации.
Блок осадки состоит из носовой и кормовой мерительных труб, установленных как можно ближе к теоретическим перпендикулярам. Для соединения мерительных труб с заборной водой применяется способ, не требующий сверления в корпусе судна отверстий, которые обычно засоряются при даче заднего хода на мелководье или в порту. Предусмотрено демпфирование колебаний уровня забортной воды в мерительных трубах. На верхних концах мерительных труб установлены датчики осадки – уровнемеры типа РУМБ-БКМ рязанского завода «Теплоприбор».
Блок угла крена в принципе представляет собой ватерпас, установленный в машинном отделении и состоящий из заполненных жидкостью мерительных труб, сообщающихся между собой через соединительную трубу, длина которой приблизительно равна ширине судна. На верхних концах мерительных труб установлены уровнемеры РУМБ-БКМ.
В блок кренящего момента входят два судовых штатных балластных танка с малой площадью горизонтального сечения и большой высотой для уменьшения влияния свободной поверхности жидкости. В каждом центре тяжести танка установлены мерительные трубы. На верхних концах измерительных труб установлены уровнемеры РУМБ-БКМ.
Блок прочности предназначен для измерения изгибающего момента и перерезывающих сил и состоит из датчиков (тензометры) прочности, установленных по методике проверки прочности корпусов судов в контролируемых сечениях корпуса судна и модуля измерения напряжений в корпусе судна (система СИИТ-3 краснодарского завода «Тензоприбор»). Функционально в блок прочности входит также блок осадки
Подсистема АСКОП-ПМ состоит из уровнемеров, установленных в крупных танках судовых запасов и в балластных танках, а также из сигнализаторов уровня, установленных в мелких танках. Блок управления представляет собой компьютер и аппаратуру управления и блок сопряжения с датчиками. Установлен он в помещении грузового бюро судна.
Основу принципа работы АСКОП составляет автоматизация опыта кренования и измерения относительных деформаций корпуса с целью определения фактических характеристик остойчивости и прочности судна. Во время установки системы в память компьютера вводится исходная информация о судне: масштаб Бонжана, кривые теоретического чертежа, пантокарены, калибровочные таблицы танков большого объема, координаты размещения контейнеров и другие данные, а также функциональные программы всех задач, решаемых системой.
АСКОП работает в двух режимах. Расчетный режим (режим сталодикатора) и режим измерения.
Расчетный режим необходим для составления или проверки предварительного грузового плана или плана догрузки/выгрузки в промежуточных портах, дает рекомендации по рациональному размещению нагрузок (груз, балласт, судовые запасы) с целью улучшения посадки, остойчивости и прочности судна. Система предвычисляет и индицирует на различных носителях информации в форме графиков и цифропечати необходимую информацию о состоянии судна: посадку, водоизмещение, дедвейт, количество груза и судовых запасов, остойчивость и прочность с их допустимыми значениями и другие данные на момент окончания грузовых операций, на отход, на каждый или отдельный день (на проход узкостей или мелководья, встреча с циклоном, приход в порт и др.) планируемого рейса.
В режиме измерения во время стоянки в порту для определения метацентрической высоты с помощью блока накренения создается кренящий момент закаткой воды в один из бортовых кренящих танков или перекаткой воды из одного кренящего танка в другой. Судно накреняется на один-три градуса. Датчиками измеряется приращение угла крена, осадка, кренящий момент, механические напряжения в контролируемых сечениях, при необходимости измеряются уровни жидкостей во всех судовых емкостях. Информация от датчиков поступает в компьютер, определяются все предусмотренные характеристики остойчивости и прочности и их допустимые значения. В наглядном виде дается распечатка всей информации. Оформляется документирование данных на отход судна в соответствии с формой, требуемой портовыми властями.
На ходу и при переходе между портами на транспортном судне характеристики посадки, прочности и остойчивости меняются только в результате балластировок и расходования судовых запасов. Поэтому в любой момент рейса подсистемой АСКОП-ПМ по данным датчиков уровня жидкостей в судовых емкостях корректируются все измеренные в порту мореходно-прочностные характеристики.
Обмен информацией с компьютером при расчете и проверке предварительного грузового плана ведется в диалоговом режиме, что дает возможность грузовому помощнику непосредственно вмешиваться в процесс обработки информации, получать результаты на любом этапе, устранять ошибки и вводить дополнительную информацию. Экипажу нет необходимости знать устройство блока управления, так как диалоговый режим и язык традиционной морской символики делает легкодоступным общение с системой для всего командного состава.
Испытание экспериментальных образцов АСКОП проходило три года. Результаты показали работоспособность системы даже на отечественной аппаратуре общепромышленного исполнения. Кроме прямого назначения, повышение безопасности мореплавания АСКОП дает возможность увеличить провозную способность судна.
Так, в первом же экспериментальном рейсе в порту Нью-Орлеан после точных измерений был выявлен значительный запас остойчивости судна, который позволил дополнительно принять на самый верхний ярус на палубу шестьдесят контейнеров, не нарушая безопасности эксплуатации судна. Были выявлены другие, незапланированные функции системы. Например, с помощью блока осадок (режим автономного дифферентометра) удалось выходить на ходу на рациональный дифферент, что дало возможность экономить топливо.
Система АСКОП была рекомендована для серийного производства и установки на судах Минморфлота СССР.
АСКОП измеряет несколько главных параметров, по которым оценивается лишь остойчивость и прочность судна на тихой воде. Для более полной оценки безопасного состояния судна необходим контроль других факторов, от которых также зависит безопасность судна (непрерывный контроль в море измеренных АСКОП в порту характеристик, которые постоянно меняются в течение рейса и могут иногда сильно измениться на переходе; непотопляемость; аварийная посадка; прогноз изменения состояния судна при пробоине с выдачей надежных рекомендаций капитану по принятию решений в аварийной ситуации; пожарная безопасность; рекомендации по выбору безопасной скорости и курса в жестокий шторм и другие факторы).
САКСС нужны только инвестиции
Для этого имеется возможность на базе АСКОП создать систему автоматического непрерывного контроля безопасного состояния судна (САКСС). Можно решать задачи передачи функций не только выдачи рекомендаций, но и принятия решений и их самостоятельного исполнения системой САКСС. Предварительный анализ существующих технических средств позволяет сделать заключение о возможности разработки и серийного выпуска такой системы на отечественной технике, а также с использованием уже существующих судовых модулей.
Во время создания АСКОП проблема контроля состояния судна была решена лишь частично: получение исходной информации от датчиков и ее первичная информация. Однако средства автоматической обработки информации были недостаточно разработаны и совсем не было средств автоматической проводной и беспроводной передачи больших объемов информации.
Современная компьютеризация, внедрение более надежных и точных датчиков, использование перспективных датчиков на базе нанотехнологий, появление спутниковой и мобильной связи обуславливают возможность создания средств контроля за состоянием судна и окружающей средой как на судне, так и с берега. Фактически с помощью САКСС судовладелец, фрахтователь или централизованно агентство могут получить почти полную информацию о состоянии судна, на ее базе принять решение и даже реализовать его на судне. Образно говоря, судовладелец/фрахтователь/агентство могут обнаружить изменение состояния судна и груза в нежелательную, худшую или опасную сторону раньше экипажа или следить за тем, что происходит на ходовом мостике и в машинном отделении на ходу судна.
Для создания такой системы в настоящее время необходимы только инвестиции. Технические средства, квалифицированные кадры и производственные мощности в стране имеются. Принципиально система САКСС состоит из:
– судовых датчиков, измеряющих характеристики судна;
– приемника сигналов от судовых датчиков и от внешних источников (спутники, АИС, СУДС и др.);
– бортового компьютера;
– сервера передачи информации на берег;
– берегового приемника радио и видеосигналов;
– береговой ЭВМ с блоком обработки и индикации информации, удобной для восприятия береговым персоналом с возможностью проигрывания принятых решений и анализом полученных результатов проигрывания;
– блока обратной связи.
Принцип работы. В течение эксплуатационного периода обработанная компьютером информация, получаемая от установленных на судне датчиков, и частично информация от экипажа поступает одновременно на бортовой и береговой компьютеры. Аварийная информация или предварительная информация о возможности аварии дублируется звуковой и световой сигнализацией.
Автоматически непрерывно или дискретно передаются на бортовой и береговой блоки индикации все измеренные характеристики состояния судна и их допустимые значения. Передаются на берег решения экипажей по борьбе с аварией или оценка предаварийной ситуации.
По обратной связи передаются рекомендации или предложения береговых служб по повышению качества решений экипажа. Такие рекомендации разрабатываются на базе береговой ЭВМ с более широкими возможностями, чем бортовой компьютер.
Выполняются функции черного ящика и автоматизированных систем контроля мореходности.
В памяти береговой ЭВМ накапливается детальная информация, необходимая для безопасной и рациональной эксплуатации судов компании: судоходная, эксплуатационная, гидрометеообстановка (статистический и ближайший гидрометеопрогноз с рекомендованными наивыгодными путями следования при океанских переходах), уточненное описание портов захода судов вплоть до описания личных особенностей обслуживающего персонала.
В зависимости от количества и типа датчиков, программного обеспечения, типа судна и желаний заказчика система напрямую измеряет и непрерывно или дискретно индицирует на судовой и береговой экран фактические данные:
– информацию о движении судна (координаты, курс, скорость, качка, посадка и др.);
– данные о грузе (температура, влажность, обводнение);
– количество, распределение и расход судовых запасов;
– количество и распределение по грузовым помещениям принятого/выгруженного груза (для наливных судов);
– состояние корпуса судна (изгибающие моменты, перерезывающие силы, местная прочность и их допустимые значения), т.е. выполняются функции автоматизированной системы контроля мореходности;
– информация или предварительная информация о возможности аварии дублируется звуковой и световой сигнализацией;
– характеристики остойчивости и их допустимые значения;
– сигнализация о неконтролируемом поступлении забортной воды в грузовые помещения;
– ситуация на мостике и в ЦПУ на ходу судна;
– место пробоины и скорость поступления воды в корпус;
– назреваемое место пожара или сигнализация о пожаре;
– встречные суда и ближайшие береговые опасности;
– процесс расхождения с встречными судами;
– сигналы бедствия своих и других судов;
– сигналы судовых тревог;
– сигналы о выходе из строя навигационных приборов;
– сигналы судовых тревог,
– сигналы о выходе из строя навигационных приборов, ДАУ, телеграфа, аварийных остановках главных двигателей,
– параметры контроля операций по замене балласта в соответствии с требованиями МЕРС;
– другие дополнительные функции и данные о состоянии судна, обычно выявляемые в процессе разработки и испытаний САКСС.
Экономический эффект
Эксплуатация систем на транспортном судне может дать экономический эффект:
– повышение безопасности эксплуатации судов (предупреждение крупных аварий, разливов нефтепродуктов, гибели людей) – 0,5% от стоимости судна ежегодно;
– увеличение провозной способности судов из-за выявления дополнительного запаса остойчивости (лесовозы, контейнеровозы и др.) – 1,2% от стоимости судна;
– удлинение срока эксплуатации корпуса судна вследствие непрерывного контроля его общей и местной прочности;
– экономия топлива при выходе судна на оптимальную посадку по данным датчиков;
– наличие САКСС на борту позволяет исключить ненужные перештивки контейнеров в портах;
– при авариях САКСС позволяет получать развитие реальной предаварийной ситуации, что дает возможность вырабатывать более гибкую стратегию при рассмотрении дел в международных судах.
В заключение напомню, что все вышеперечисленные показатели получены исходя из опыта эксплуатации двух опытных образцов системы АСКОП, являющейся первым этапом создания САКСС.
Морские вести России №16 (2024)









19.05.2025
Безопасность мореплавания

