


Инновационная система безэкипажного судовождения в порту
30.09.2024
Безопасность мореплавания
УДК 656.61.052

Дооборудованный буксир-спасатель «Николай Семенченко». Фото авторов статьи
Статья посвящена результатам разработки и испытаний системы автономного судовождения в порту. Особое внимание уделено вновь разработанному оборудованию, обеспечивающему требуемую навигационную точность судовождения в морском порту. Показано, что впервые в РФ осуществлено дистанционное управление судном удаленным капитаном с пульта дистанционного управления и автономное движение судна по сложной траектории в стесненных условиях морского порта Новороссийск.
Ключевые слова: порт, безэкипажное судовождение, безэкипажное судовождение в порту, система технического зрения, идентификация надводных объектов, автономная навигационная система (АНС), точность навигации, бесплатформенная инерциальная навигационная система (БИНС), Real Time Kinematic (RTK).
Митянин А.Г., к.т.н., генеральный директор АО «НПП «Авиационная и морская электроника» (АО «НПП «АМЭ»)
Соловьев Д.Б., к.т.н., главный конструктор научно-технического центра техники связи АО «НПП «АМЭ»
Innovative system for unmanned navigation in port
The paper concentrates on the development and trials results with respect to the system for unmanned navigation in port. Special consideration has been given to the newly designed equipment that provides the required accuracy when navigating within a seaport. For the first time in the Russian Federation, a vessel externally handled by a remote captain from a remote control panel was demonstrated, as well as the autonomous vessel motion along a complex trajectory in confined waters of Novorossiysk seaport.
Keywords: port, unmanned navigation, unmanned navigation in port, computer vision system, surface objects identification, Autonomous Navigation System (ANS), navigation accuracy, Strapdown Inertial Navigation System (SINS), Real Time Kinematic (RTK).
Mitianin A., Ph.D., General Director of JSC NPP Aviation and Marine Electronics (AME)
Solovev D., Ph.D., Chief Designer of the Scientific and Technical Center of Communication Technology of JSC NPP AME
Введение
Разработка системы автономного судовождения в порту (БЭС-СП) выполнена АО «Научно-производственное предприятие «Авиационная и морская электроника» (АО «НПП «АМЭ») в рамках ОКР «Маяк-САС» в период с ноября 2021 по декабрь 2023 года в соответствии с государственным контрактом, заключенным с Министерством промышленности и торговли РФ. Успешное выполнение ОКР показало практическую возможность реализации как дистанционного управления судами, так и автономного движения судов с категорией морского автономного надводного судна (МАНС) не ниже RCMC-RC1 в стесненных условиях морского порта.
Новизна решаемой задачи заключалась в создании системы БЭС-СП, позволяющей судну двигаться автономно (без экипажа на борту) в условиях порта и объединяющей на основе морской отказоустойчивой защищенной системы связи (МОСС) технические средства высокоточного позиционирования на судне, на причале и в акватории порта, сервисы а-навигации, автономную навигационную систему (АНС), а также средства управления исполнительными судовыми винто-рулевыми механизмами и автоматизированного контроля за работой всего судового оборудования. Необходимо отдельно отметить наличие в составе БЭС-СП инновационной оптической системы анализа окружающей обстановки и состояния судна (ОСА), обеспечивающей круглосуточное автоматическое обнаружение, распознавание и идентификацию окружающих надводных объектов: судов, причалов, навигационных знаков и т.п.
Испытания и опытная эксплуатация БЭС-СП успешно проведены АО «НПП «АМЭ» в 2023 году в морском порту Новороссийск с участием дооборудованного системой БЭС-СП буксира-спасателя «Николай Семенченко». При этом пост дистанционного управления (ПДУ) был размещен на территории ФГБОУ ВО «Государственный морской университет имени адмирала Ф.Ф.Ушакова» (ГМУ им. адм. Ф.Ф.Ушакова).
Учитывая новизну решаемой задачи и сжатые сроки разработки, положительный результат был достигнут за счет: 1) декомпозиции сложной и многоплановой работы на составные части, которые могли быть реализованы с привлечением профессиональной кооперации соисполнителей, – предприятиями, имеющими необходимый научно-технический задел; 2) обязательного одобрения РМРС технических решений по созданию судового оборудования; 3) научного консультирования со стороны ведущих научных центров и университетов морского транспорта.
Целью статьи является обзор состава и возможностей БЭС-СП и обобщение результатов испытаний и опытной эксплуатации системы БЭС-СП.
1. Состав БЭС-СП
Разработанная в рамках ОКР «Маяк-САС» БЭС-СП включает в свой состав следующие системы:
1.1 Система автономного судовождения (САС)
Позволяет автоматически решать задачи определения навигационных параметров движения судна и анализа навигационной обстановки, оценки возможности возникновения навигационных опасностей, маневрирования, в том числе для избегания навигационных опасностей в акватории порта, а также контроля и управления техни-
ческими средствами МАНС. САС может быть установлена на портовых буксирах и на грузовых судах.
В состав САС включены вновь разработанные системы:
1.1.1 Автономная навигационная система (АНС), которая обеспечивает:
- распознавание целевой обстановки, оценку навигационных опасностей и определение положения собственного судна с отображением данных удаленному капитану;
- автоматическое прогнозирование маршрута движения и расчет маневров движения и безопасного расхождения судов с учетом выполнения правил МППСС-72;
- управление движением судна в автономном режиме.
АНС обеспечивает три режима работы:
- дистанционное управление удаленным капитаном из ПДУ с поддержкой принятия решений судоводителя;
- автономное движение по заранее подготовленному удаленным капитаном маршруту следования в акватории порта с автоматическим выполнением маневров, в том числе расхождения с навигационными опасностями;
- управление человеком на борту с помощью штатных судовых средств МАНС. Данный режим предназначен для использования при местном (ручном) управлении МАНС экипажем, находящимся на борту, при движении в открытом море, а также при аварийных ситуациях на судне в акватории порта и в море.
Рис. 1. Интерфейс навигационного модуля АНС
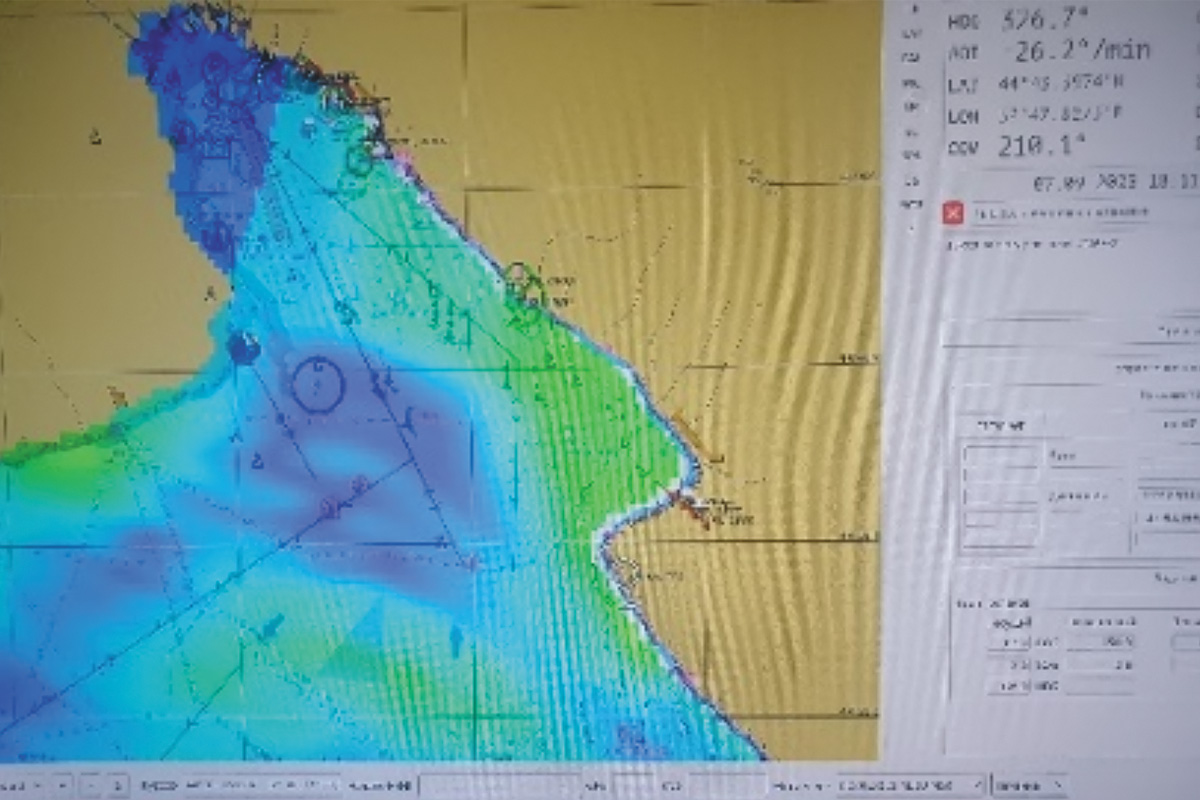
Рис. 2. Интерфейс модуля маневрирования АНС

1.1.2 Система координированного управления (СКУ) предназначена для обеспечения движения МАНС с выполнением необходимых маневров судна курсом и скоростью по данным, поступающим от органов дистанционного управления ПДУ или от судовой АНС.
1.1.3 Оптическая система анализа окружающей обстановки и состояния судна (ОСА), осуществляя непрерывное круговое наблюдение, обеспечивает:
- наблюдение и распознавание окружающей обстановки судна в видимом и ИК-диапазонах;
- определение расстояния и курсового угла до обнаруженных надводных объектов, слежение за ними;
- наблюдение за событиями на палубе и во внутренних помещениях судна.
1.1.4 Система высокоточной проводки и швартовки (СВПШ) обеспечивает высокоточное определение навигационных параметров движения судна в акватории морских портов с требуемой точностью2 с помощью данных от всех доступных спутниковых систем навигации, а также с учетом принимаемых геодезических поправок RTK при использовании БИНС.
1.1.5 Система детальной регистрации данных и подсистема самодиагностики (СДРПС) представляют собой СПО, обеспечивающее сбор данных самодиагностики всех элементов БЭС-СП и предоставляющее их на отображение оператору ПДУ.
1.1.6 Средства мониторинга доступности и контроля (СМК) служат для мониторинга доступности и контроля основных параметров сети БЭС-СП, а также состояния и работоспособности серверов БЭС-СП с целью своевременного реагирования на нештатные ситуации и отслеживания динамики ресурсов сети.
Рис. 3. Интерфейс рабочей станции СКУ
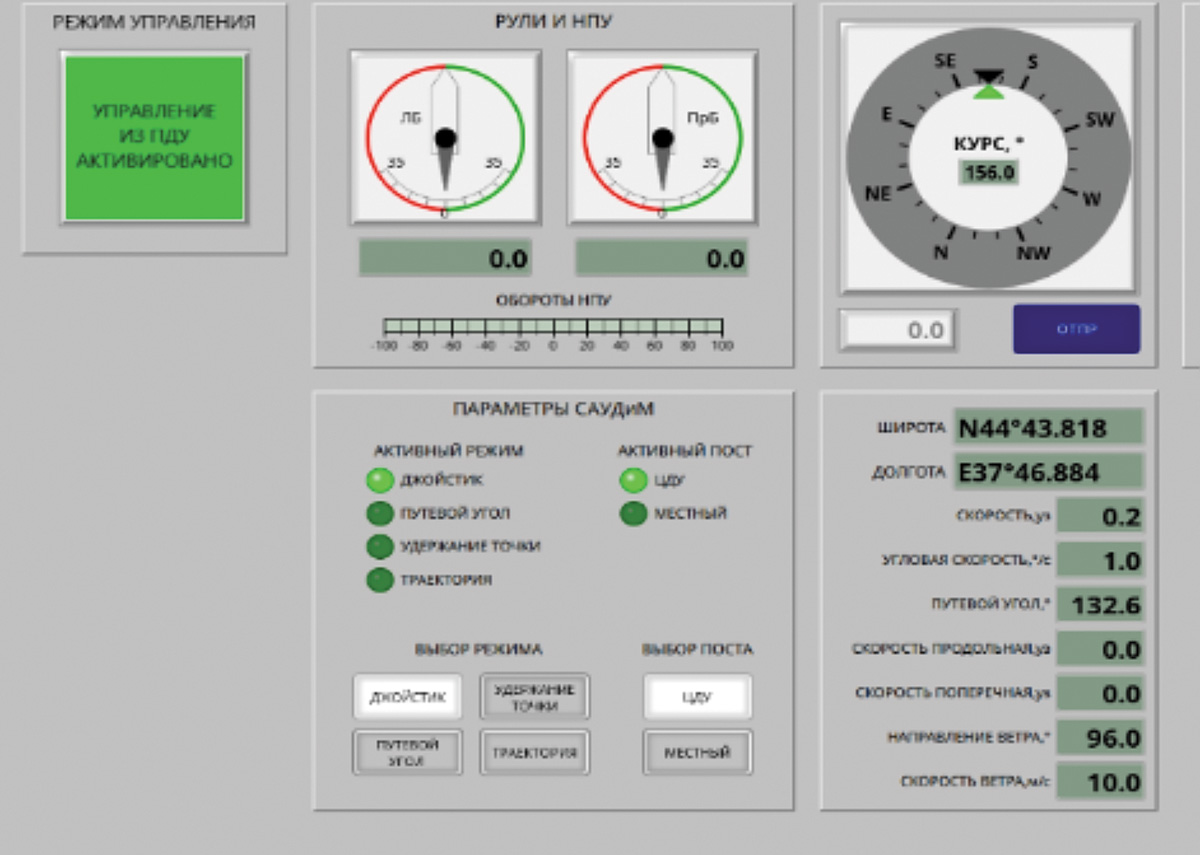
Рис. 4.
Обзорно-поисковая система ОСА

1.2 Пост дистанционного управления (ПДУ)
Обеспечивает решение комплекса задач дистанционного контроля и управления МАНС. ПДУ предназначен для оснащения центров дистанционного управления (ЦДУ) судами.
В состав ПДУ входят:
1.2.1 Комплексное рабочее место (КРМ) удаленного капитана, предназначенное для обеспечения дистанционного управления/контроля автономного движения МАНС, закрепленного за ним. КРМ удаленного капитана решает следующие основные задачи:
- визуальный анализ навигационной обстановки и гидрометеорологических условий в акватории и по ходу движения МАНС;
- дистанционное управление МАНС, принятие решений о возможном режиме автономности МАНС, при необходимости выдача рекомендаций по управлению судном в режиме поддержки принятия решений;
- мониторинг движения МАНС;
- анализ состояния технических средств МАНС;
- видеоотображение реальной обстановки на МАНС и вокруг него;
- разработка планов рейсов, их утверждение, передачу на МАНС и хранение маршрутов движения МАНС;
- поддержка речевой радиосвязи с МАНС, лоцманом, грузовыми терминалами, буксирами, окружающими судами, судовладельцами и портовыми службами;
- мониторинг выполнения швартовных операций и состояния судна при стоянке.
Рис. 5. КРМ удаленного капитана

1.2.2 КРМ оператора ПДУ/администратора безопасности обеспечивает решение следующих задач:
- анализ навигационных и гидрометеоусловий в акватории на основании данных, предоставленных береговыми службами и сервисами а-навигации БЭС-СП;
- непрерывный контроль состояния технических средств БЭС-СП, расположенных на всех МАНС, на территории и в акватории порта;
- поддержка речевой радиосвязи со всеми МАНС, лоцманом, грузовыми терминалами, буксирами, судами, судовладельцами и портовыми службами;
- администрирование локальных и беспроводных сетей БЭС-СП, установление правил разграничения доступа к оборудованию ПДУ и к сетевым ресурсам БЭС-СП.
Рис. 6. КРМ оператора ПДУ

1.2.3 Система серверного хранения и обработки навигационных и телеметрических данных (СХиОД) выполняет системообразующие функции БЭС-СП на борту судна и на берегу и представляет собой комплект технических средств, обеспечивающих решение задач обработки, хранения, распределения и резервирования данных систем БЭС-СП, а также сопряжения с внешними системами, необходимыми для функционирования БЭС-СП, и защиты данных от несанкционированного доступа.
1.3 Морская отказоустойчивая система связи (МОСС)
Предназначена для обеспечения функционирования защищенной информационной сети всех элементов БЭС-СП. МОСС представляет собой систему обмена данными между элементами БЭС-СП на борту судна (судовой комплект) и на берегу (береговой комплект), включая защищенную локальную сеть, к которой подключаются элементы САС, средства беспроводной связи для обмена данными между МАНС и ПДУ.
Все элементы БЭС-СП на борту судна и на берегу объединены в защищенную беспроводную сеть и проводную сеть, доступ к которым контролируется с использованием технических средств защиты от НСД, шифрования данных, брандмауэра для защиты периметра, контроля и ограничения сокетов.
Обмен данными осуществляется с помощью средств связи, обеспечивающих высокоскоростные каналы беспроводной связи:
- основной сети (реализованы на технологии WiMAX);
- резервной сети (основаны на технологии LTE).
Рис. 7. Базовая станция МОСС на ПДУ

Рис. 8.
Абонентская станция МОСС на МАНС

1.4 Береговая система мониторинга швартовных операций (СМШО)
Включает две опорные точки (на базе лазерно-оптического дальномера), размещаемые на причале. СМШО предназначена для предоставления высокоточных данных о положении корпуса швартуемого судна/буксира относительно причала для выполнения швартовных операций:
- поперечного смещения (расстояние от причала до судна, скорость сближения судна и причала, угол положения судна по отношению к линии причала);
- продольного смещения (расстояние от причала до судна);
- мониторинга изменения осадки судна относительно причала при выполнении погрузо-разгрузочных работ.
1.5 Морская автоматическая система гидрометеорологического мониторинга (АСГММ)
Обеспечивает непрерывное формирование сетки высокоточной гидрометеорологической информации, включая данные о ветре, течениях и волнении, и позволяет производить оценку влияния гидрометеофакторов на движение судна. АСГММ включает в свой состав следующие элементы:
- автономная буйковая гидрометеостанция (АГБС), измеряющая скорость и направление ветра, скорость и направление поверхностного течения;
- подводный профилограф течений (АПП), измеряющий скорость течения и высоту волны;
- автоматическая метеорологическая станция (АМС), измеряющая скорость и направление ветра.
1.6 Гидроакустическая система позиционирования (ГСП)
Выполняет функцию резервной системы позиционирования судна в акватории в случае отсутствия приема сигналов ГНСС. ГСП обеспечивает определение навигационных данных движущегося в акватории судна (местоположение с точностью до 1 метра и путевой угол с точностью не хуже 1,5°) и передачу полученных данных в АНС.
В состав ГСП входит комплект судового оборудования, а также сеть из маяков-ответчиков, размещенная на дне акватории порта.
1.7 Носимый лоцманский комплект (НЛК ТСВП)
Обеспечивает высокоточное определение координат местоположения судна, в том числе не оснащенного системами САС, а также отображение лоцману (капитану судна) навигационной, гидрометеорологической и справочной информации (посредством сервисов а-навигации). В НЛК ТСВП реализована система поддержки принятия решения лоцманом (СППР) в режимах планирования маршрутов проводки судов и контроля выполнения задания.
СППР в том числе позволяет выдавать рекомендации лоцману по удержанию судна на спланированной траектории с учетом воздействия на судно гидрометеофакторов.
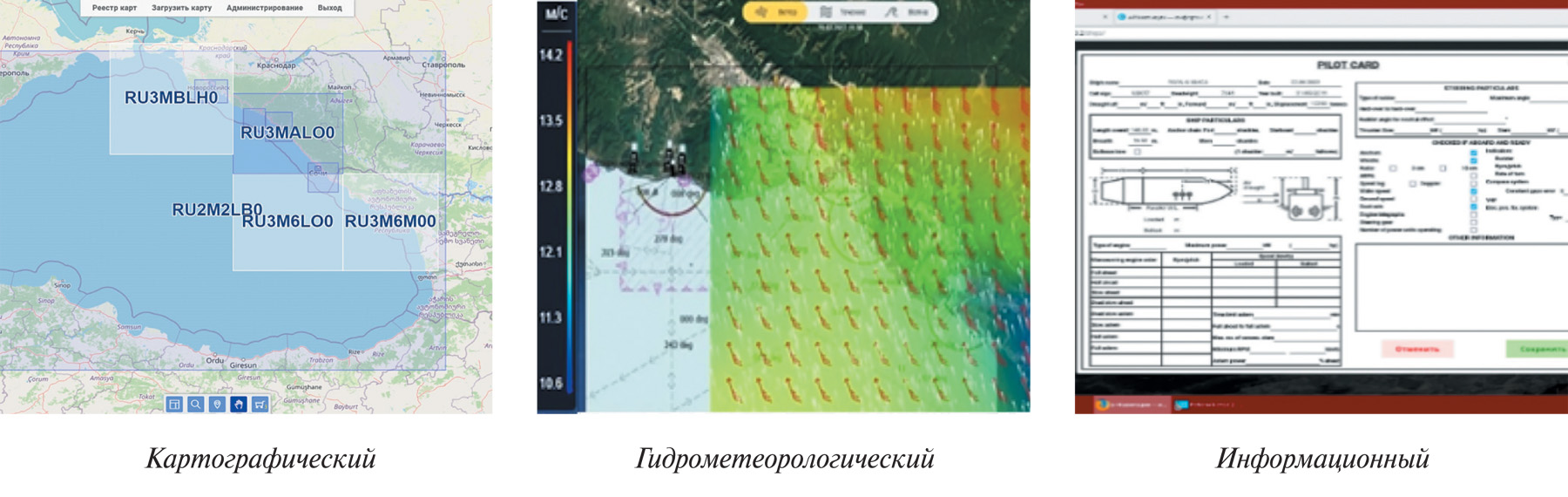
1.8 Сервисы а-навигации
В рамках ОКР «Маяк-САС» были разработаны следующие сервисы а-навигации:
- картографический – хранение, корректура и обновление электронных морских навигационных карт акватории порта, а также определение координат судна с использованием данных всех доступных ГНСС и поправок RTK в режиме онлайн;
- гидрометеорологический – автоматический прием и анализ данных, непрерывное построение трех дополнительных слоев электронной карты – поля ветра, волнения и течения для заданной акватории порта;
- информационный – предоставление доступа онлайн к базе данных о конструктивных особенностях корпуса грузового судна, а также другой информации в части осадки судна, двигателей и движителей, рулевого и подруливающего устройств и другого оборудования судна, проводка и швартовка которого проводится с применением буксиров-автоматов.
Рис. 9. Сервисы а-навигации
2. Испытания и опытная эксплуатация
Испытания и опытная эксплуатация (ИОЭ) БЭС-СП в морском порту Новороссийск проводились при условии выполнения требований МППСС-72 и Обязательных постановлений в морском порту Новороссийск3 с учетом согласования Администрацией морского порта выделенного района испытаний, времени и дополнительных ограничений на период ИОЭ БЭС-СП.
Программа и методики ИОЭ предусматривали проверки функционирования систем БЭС-СП в натурных условиях с выходом буксира в выделенный район акватории порта и проведением проверок дистанционного управления и автономного движения. ИОЭ длились 70 суток, общее время задействования буксира составило более 136 часов.
При проведении проверок отрабатывались сценарии, наиболее характерные для маневрирования буксиров при решении задач проводки и швартовки грузовых судов в порту: переход по акватории порта в точку встречи грузового судна, удержание позиции в ожидании грузового судна, выход на позицию швартовки буксира к судну, проводка (эскортирование) грузового судна, швартовка грузового судна к причалу и т.п.
Устранение замечаний и реализация рекомендаций осуществлялись непосредственно в ходе ИОЭ, в общей сложнос-ти устранено и реализовано несколько десятков замечаний и рекомендаций.
3. Основные результаты
Основные результаты испытаний и опытной эксплуатации БЭС-СП:
- впервые в РФ осуществлено дистанционное управление судном удаленным капитаном с ПДУ в морском порту с учетом текущей гидрометеообстановки;
- впервые в РФ осуществлено автономное движение судна в морском порту по сложной траектории, позволившей реализовать в полной мере маневренные качества буксира «Николай Семенченко»;
- автономное движение судна и его дистанционное управление осуществлялись как в светлое, так и в темное время суток;
- подтверждена реализация требуемой точности движения судна в морском порту при автономном движении и дистанционном управлении судном.
В ходе выполнения ОКР от РМРС получено принципиальное одобрение (Approval in Principle, AIP) в соответствии с п.3.6 части II «Техническая документация» «Правил технического наблюдения за постройкой судов и изготовлением материалов и изделий для судов» на оборудование и комп-лект технической документации на систему автономного судовождения в порту БЭС-СП (ОКР «Маяк-САС»)4.
4. Учет особенностей эксплуатации МАНС
Ряд выявленных в ходе испытаний и опытной эксплуатации БЭС-СП особенностей эксплуатации МАНС должен найти свое отражение в проектах изменений в нормативные акты и документы технического регулирования, необходимые для эксплуатации безэкипажных судов в акваториях морских портов, а также по дооснащению портовой инфраструктуры необходимым оборудованием.
5. Заключение
Разработанная АО «НПП «АМЭ» БЭС-СП является одним из важных шагов на пути создания автономного судоходства в РФ. Дальнейшие работы по автономному судоходству предполагают комплексное объединение технических средств автономного судовождения в порту и в открытом море в целях обеспечения движения грузовых судов по схеме berth-to-berth (от причала к причалу) с последующими испытаниями и опытной эксплуатацией в реальных условиях грузовых перевозок.
Инновационные решения АО «НПП «АМЭ» по оборудованию безэкипажных судов, портовой инфраструктуры позволят оптимизировать работу морских портов и повысить безопасность судоходства при выполнении швартовных операций, а применение безэкипажных буксиров-автоматов позволит сократить затраты и снизить риски для здоровья и безопасности моряков. Кроме того, автоматизация процессов маневрирования судов в порту сократит время простоя судов и повысит эффективность работы морского порта.
Список литературы
1. РМРС. Положения по классификации морских автономных и дистанционно управляемых надводных судов (МАНС). НД №2-030101-037. - Санкт-Петербург, 2020.
2. Приказ Минтранса России от 30.11.2017 г. №503 «Об утверждении Обязательных постановлений в морском порту Новороссийск». – Текст электронный – URL: Приказ Министерства транспорта РФ от 30.11.2017 N 503 «Об утверждении Обязательных постановлений в морском порту Новороссийск» | ГАРАНТ (garant.ru).
3. РС выполнил принципиальное одобрение САС БЭС-СП. [Электронный ресурс] URL: https://rs-class.org/news/general/rs-vypolnil-printsipialnoe-odobrenie-sas-bes-sp. Дата обращения: 18.01.2024.
1. РМРС. Положения по классификации морских автономных и дистанционно управляемых надводных судов (МАНС). НД №2-030101-037, п. 1.2.4
2. РМРС. Положения по классификации морских автономных и дистанционно управляемых надводных судов (МАНС). НД №2-030101-037, п.9.1.2.13.
3. Приказ Министерства транспорта РФ от 30 ноября 2017 г. №503 «Об утверждении Обязательных постановлений в морском порту Новороссийск».
4. РС выполнил принципиальное одобрение САС БЭС-СП [Электронный ресурс] URL: https://rs-class.org/news/general/rs-vypolnil-printsipialnoe-odobrenie-sas-bes-sp. Дата обращения: 18.01.2024.
Морские порты №5 (2024)










19.05.2025
Безопасность мореплавания


